
ロボット、自動運転、スマートファクトリー、産業用AIの領域で、近年「ワールドモデル」という言葉が急速に重要になっています。
ワールドモデルとは、簡単に言えば、AIが現実世界の構造や変化を理解し、未来に起こりうる状態を予測するためのモデルです。従来のAIが画像を分類したり、文章を生成したり、音声を認識したりすることに強みを持っていたのに対し、ワールドモデルは、物体がどのように動くのか、人や車両がどのように移動するのか、ロボットがある行動を取った時に周囲の環境がどう変化するのかを扱います。
つまり、AIが「画面の中」だけで賢くなるのではなく、現実世界で動くロボットや自動運転車が、周囲を理解し、先を読み、より安全に行動するための基盤技術です。
NVIDIAは、フィジカルAI開発向けに「NVIDIA Cosmos」というワールド基盤モデルプラットフォームを展開しており、同社はCosmosを、ワールド基盤モデル、トークナイザー、ガードレール、データ処理パイプラインなどを含むプラットフォームとして説明しています。
https://www.nvidia.com/en-us/ai/cosmos
また、NVIDIAの技術ブログでは、CosmosはフィジカルAIシステム向けのカスタムワールドモデルを大規模に構築するためのプラットフォームと位置づけられています。
https://developer.nvidia.com/blog/advancing-physical-ai-with-nvidia-cosmos-world-foundation-model-platform/
この流れは、ロボット産業を見るうえで非常に重要です。これからのロボット開発では、単に「動く機械」を作るだけでは不十分になります。ロボットが現場で使われるためには、周囲の状況を理解し、行動の結果を予測し、失敗しそうな動きを避け、安全で効率的な判断を行う必要があります。その中心にある技術の一つが、ワールドモデルです。
ワールドモデルとは何か
ワールドモデルは、現実世界の物理的・空間的な変化を理解するためのニューラルネットワークです。入力としては、テキスト、画像、動画、センサー情報、ロボットの動作データなどが使われます。それらをもとに、実際の物理環境に近い映像や状態変化を生成したり、未来の状況を予測したりします。
たとえば、自動運転車が交差点に近づいた時、周囲の車両、歩行者、自転車、信号、道路状況を認識するだけでは不十分です。次の数秒で歩行者が渡り始めるのか、前方車両が急停止する可能性があるのか、雨で路面が滑りやすくなっているのか、といった変化を予測する必要があります。

ロボットの場合も同じです。倉庫ロボットが荷物を持ち上げる時、物体の重さ、形状、滑りやすさ、周囲の障害物、人の動きなどを考慮しなければなりません。ヒューマノイドロボットであれば、さらに複雑です。人間の生活空間や工場内で動くためには、物体をつかむ、置く、押す、避ける、待つといった行動の結果を予測する必要があります。
ワールドモデルは、AIにとっての「頭の中のシミュレーター」のようなものです。現実世界でいきなり試すのではなく、AIが仮想空間の中で「こう動いたらどうなるか」を試し、よりよい行動を選ぶための仕組みだと考えるとわかりやすいです。
なぜ今、ワールドモデルが重要になっているのか
ワールドモデルが注目される背景には、フィジカルAIの台頭があります。
フィジカルAIとは、現実世界で動作するAIのことです。ロボット、自動運転車、ドローン、産業機械、スマートファクトリー、配送ロボットなどが代表例です。これらのAIは、単にデータを処理するだけでなく、物理世界の中で動き、判断し、環境に影響を与えます。
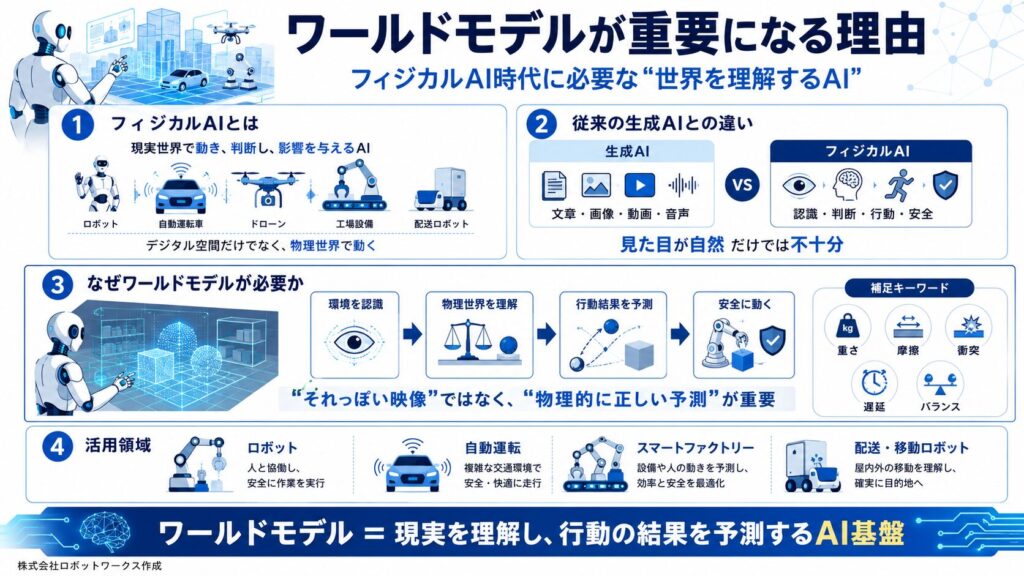
従来の生成AIは、文章、画像、動画、音声など、主にデジタル空間のコンテンツ生成で発展してきました。しかし、フィジカルAIでは、生成された映像が見た目として自然であるだけでは足りません。物理法則として正しいか、安全な行動につながるか、現実のロボットや車両の動作に使えるかが問われます。
たとえば、AIが「ロボットが箱を持ち上げる映像」を生成できたとしても、その箱の重さや摩擦、ロボットアームの可動範囲、バランス、衝突リスクが現実と一致していなければ、実用にはなりません。見た目は正しくても、物理的には間違っている。この問題を解決するために、ワールドモデルの重要性が高まっています。
研究面でも、ワールドモデルには「単に未来の映像を予測するだけでよいのか、それとも行動の結果を物理的に正しく理解する必要があるのか」という議論があります。2026年に公開された論文では、エンボディドAI向けのワールドモデルは、見た目として自然な未来を予測するだけでは不十分で、行動による介入の結果を物理的に正しく扱う必要があると指摘されています。
https://arxiv.org/abs/2605.30542
この点は、ロボット産業にとって非常に重要です。ロボットは動画を作るために存在するのではなく、現実の環境で安全に動くために存在します。だからこそ、ワールドモデルには「それらしい映像を生成する能力」だけではなく、「現実の物理環境を理解し、行動結果を予測する能力」が求められます。
ワールドモデルはどのように作られるのか
ワールドモデルを作るには、膨大なデータが必要です。特に自動運転やロボットのようなフィジカルAIでは、現実世界の映像、画像、センサー情報、動作データ、シミュレーションデータなどを大量に集める必要があります。
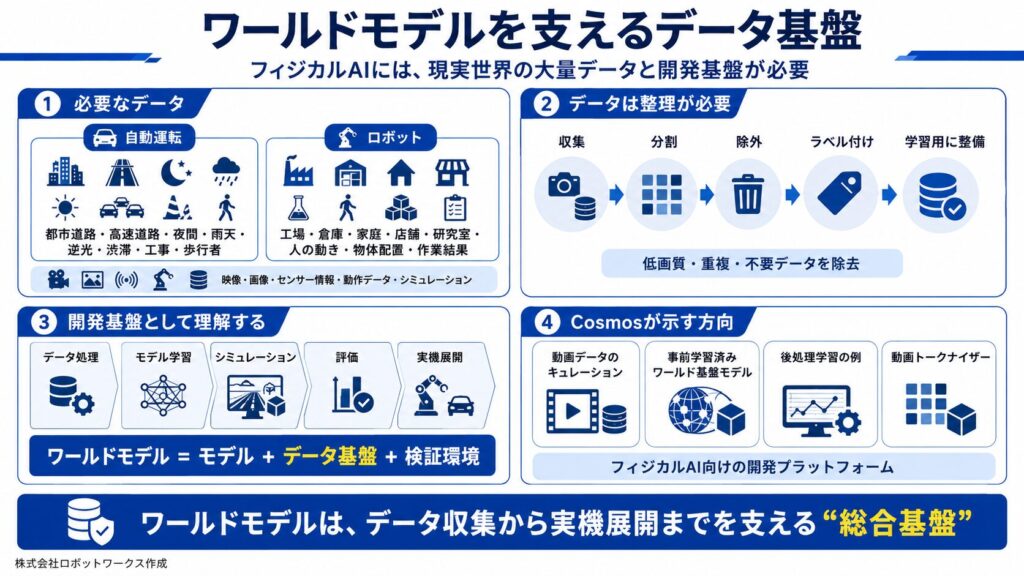
自動運転であれば、都市道路、高速道路、夜間、雨天、逆光、渋滞、工事現場、歩行者の飛び出しなど、多様な環境データが必要です。ロボットであれば、工場、倉庫、家庭、研究室、店舗など、さまざまな空間での物体配置、人の動き、作業手順、ロボットの動作結果が必要になります。
集めたデータは、そのまま使えるわけではありません。動画を短いクリップに分割し、画質の悪いものや重複データを除外し、物体や行動をラベル付けし、学習に適した形に整理する必要があります。大規模なワールドモデルでは、このデータ整理だけでも非常に大きな工数がかかります。
NVIDIAのCosmosに関する論文では、フィジカルAIには、AI自身のデジタルツイン、方策モデル、そして世界のデジタルツインとしてのワールドモデルが必要であると説明されています。同論文では、Cosmosを、動画データのキュレーション、事前学習済みワールド基盤モデル、後処理学習の例、動画トークナイザーを含むプラットフォームとして位置づけています。
このように、ワールドモデルは単体のAIモデルというより、データ処理、モデル学習、シミュレーション、評価、実機展開までを含む大きな開発基盤として理解する必要があります。
ワールドモデルの主な種類
ワールドモデルには、いくつかの種類があります。目的によって役割が異なります。
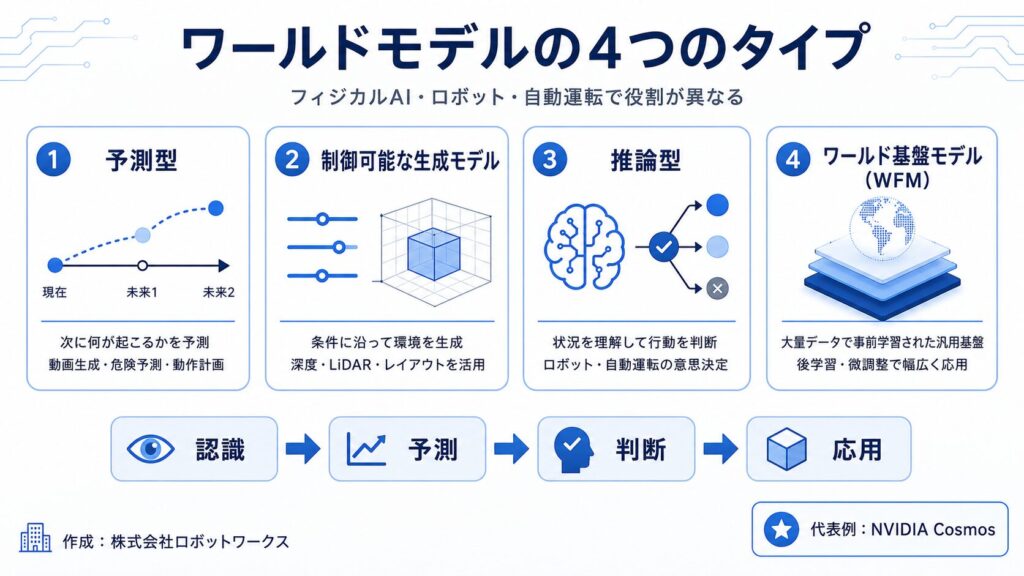
一つ目は、予測型のワールドモデルです。これは、現在の画像や動画、テキスト指示などをもとに、次に何が起こるかを予測するモデルです。たとえば、車両が交差点に入った後の交通の流れを予測したり、ロボットが物体を押した時にどのように動くかを推定したりします。
予測型ワールドモデルは、動画生成、ロボットの動作計画、自動運転の危険予測などに使われます。重要なのは、時間的に一貫したシーンを生成できることです。単発の画像が綺麗に生成できるだけではなく、数秒後、数十秒後まで自然で物理的に矛盾しない変化を表現する必要があります。
二つ目は、制御可能な生成モデルです。中国語の原文では「風格遷移模型」と表現されていますが、より実務に近い表現として「制御可能なワールド生成モデル」と呼びます。これは、深度マップ、セグメンテーション、LiDARスキャン、エッジ情報など、構造化された入力をもとに、特定の条件に沿った映像や環境を生成するモデルです。
たとえば、工場内のレイアウトを維持したまま、照明条件や人の動き、物体の配置だけを変えた仮想シーンを作ることができます。自動運転では、同じ道路構造を保ったまま、天候、交通量、歩行者の動きなどを変えて、さまざまなテストシナリオを作ることができます。
三つ目は、推論型のワールドモデルです。これは、画像、動画、テキスト、センサー情報などの多様な入力を時間・空間の文脈で分析し、何が起きているのかを理解し、次に取るべき行動を判断するモデルです。
推論型ワールドモデルは、単に映像を作るだけではありません。たとえば、ロボットが「この荷物は持ち上げるべきか、それとも先に周囲の障害物をどけるべきか」を判断する。自動運転車が「この歩行者は道路を渡る可能性が高いか」を判断する。倉庫ロボットが「どの順番で荷物を運べば最も効率的か」を判断する。こうした意思決定に関わります。
四つ目は、ワールド基盤モデルです。英語ではWorld Foundation Model、略してWFMと呼ばれます。NVIDIA Cosmosのようなモデルは、このワールド基盤モデルの代表例として位置づけられます。ワールド基盤モデルは、大量の未ラベルデータで事前学習され、さまざまなフィジカルAIタスクに応用できる汎用モデルです。NVIDIAは、2025年3月にCosmosのワールド基盤モデルとフィジカルAI向けデータツールの大型アップデートを発表し、予測、制御可能なワールド生成、推論を可能にするモデル群を示しました。
ワールド基盤モデルの価値は、開発者がゼロから巨大モデルを作らなくても、事前学習済みモデルをもとに、自社用途に合わせて後期学習や微調整ができる点にあります。これは、ロボット開発や自動運転開発の入口を大きく下げる可能性があります。
データ処理がワールドモデルの品質を左右する
ワールドモデル開発で最も重要な工程の一つが、データ処理です。
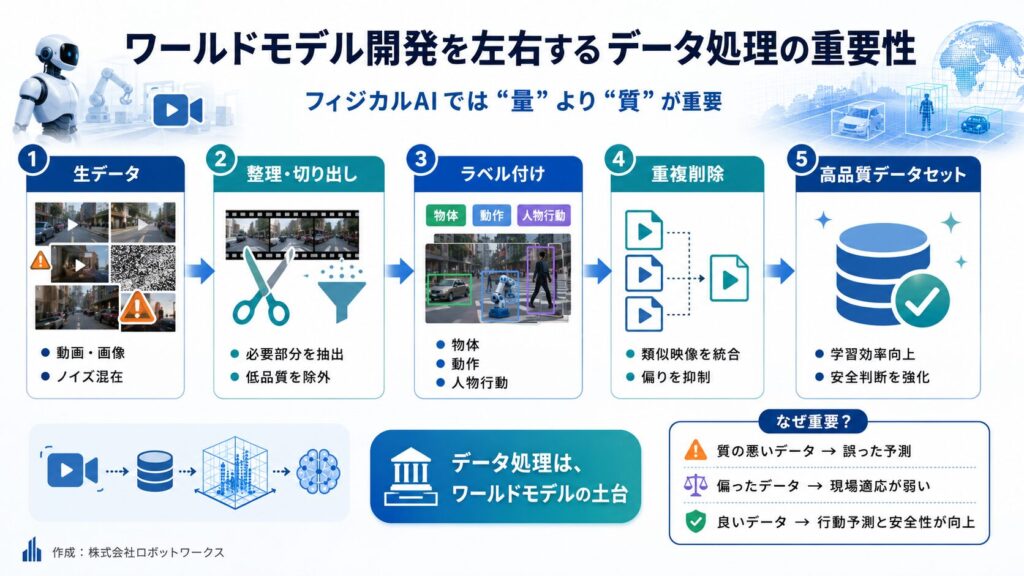
AIの世界では、モデルの構造やGPU性能が注目されがちですが、フィジカルAIでは、どのようなデータを使うかが極めて重要です。現実世界はノイズだらけです。画質の悪い映像、重複した映像、意味のない映像、ラベルが間違っているデータ、偏った環境データが混ざります。
そのため、まず動画や画像を整理し、必要な部分を切り出し、品質の低いデータを除外し、対象物や動作をラベル付けし、重複を削除する必要があります。高度な視覚言語モデルを使えば、映像中の物体、作業、人物の行動などを自動的にタグ付けできます。また、動画埋め込みを使えば、意味的に重複している映像を探し出して削除することもできます。
データ処理は地味に見えますが、実はワールドモデルの性能を左右する土台です。質の悪いデータで学習したモデルは、見た目としては自然な映像を作れても、現場で必要な行動予測や安全判断に弱くなります。フィジカルAIでは、「データの量」だけでなく、「データの質」と「データの偏り」を確認することが重要です。
トークナイザーとは何か
ワールドモデルを理解するうえで、トークナイザーも重要です。
文章生成AIでは、文章を単語や文字の単位に分解して処理します。これをトークン化と呼びます。ワールドモデルでも同じように、画像や動画の膨大なピクセル情報を、そのまま扱うのではなく、より小さく意味のある単位に変換します。これが視覚トークナイザーです。
画像や動画には非常に多くの情報が含まれています。すべてのピクセルをそのまま巨大モデルに入力すると、計算コストが膨大になります。そこで、視覚トークナイザーは、画像や動画の冗長な情報を圧縮し、モデルが扱いやすい意味的な表現に変換します。
方法としては、画像や動画を整数の列として表す離散トークン化と、連続ベクトルとして表す連続トークン化があります。どちらも、大規模な生成モデルを効率よく学習させるための重要な技術です。
NVIDIA Cosmosの論文でも、動画トークナイザーはプラットフォームを構成する重要要素として挙げられています。これは、フィジカルAIにおいて動画データをどれだけ効率的に扱えるかが、モデルの学習速度や推論性能に直結するためです。
後期学習によって用途に合わせたワールドモデルを作る
ワールド基盤モデルは汎用モデルです。そのままでも多くのことができますが、実際の産業用途では、自社の現場や特定用途に合わせた後期学習が必要になります。
たとえば、工場ロボット向けであれば、特定の製造ライン、部品、作業手順、作業者の動きに合わせてモデルを調整する必要があります。倉庫ロボットであれば、棚、パレット、通路幅、荷物の種類、ピッキング作業に合わせた学習が必要です。自動運転であれば、特定地域の道路環境、交通ルール、天候、標識、運転習慣に合わせた調整が必要になります。

後期学習には、大きく分けて教師なし学習と教師あり学習があります。教師なし学習では、ラベルのないデータからパターンや表現を学びます。これは、新しい現場環境に適応する際に有効です。教師あり学習では、ラベル付きデータを使い、特定のタスクに必要な特徴を学ばせます。これは、異常検知、物体認識、行動判断など、明確な目的がある場合に有効です。
さらに、強化学習も重要です。強化学習では、AIエージェントが環境と相互作用し、行動に対する報酬やペナルティを通じてより良い判断を学びます。ロボットが物体をつかむ、歩く、避ける、運ぶといった行動を学ぶ場合、強化学習は非常に重要な役割を果たします。
ワールドモデルと強化学習を組み合わせることで、AIは現実世界で危険な試行錯誤を行う前に、仮想空間の中で多くの行動を試すことができます。これにより、開発コストやリスクを下げながら、より安全で効率的なロボット制御を実現しやすくなります。
ワールドモデルのメリット
ワールドモデルの最大のメリットは、AIが現実世界の空間関係や物理的な挙動をより深く理解できる点です。
従来のAIは、画像の中に何が写っているかを認識することは得意でした。しかし、フィジカルAIに必要なのは、「何があるか」だけではありません。「それが次にどう動くか」「自分が行動したらどう変化するか」「どの行動が安全か」を理解する必要があります。
ワールドモデルは、こうした因果関係や時間的変化を扱うための技術です。たとえば、工場内でロボットが部品を持ち上げる時、物体が滑る可能性、周囲にぶつかる可能性、人が近づいてくる可能性を予測できます。自動運転車であれば、前方車両の急停止、歩行者の飛び出し、悪天候による視界不良などを仮想的に再現し、事前に学習できます。
もう一つの大きなメリットは、合成データの生成です。フィジカルAIの開発では、現実世界で大量のデータを集めることが難しい場合があります。特に、事故直前の危険な場面、まれにしか起こらない異常状態、工場内の危険動作などは、現実で大量に収集することが困難です。
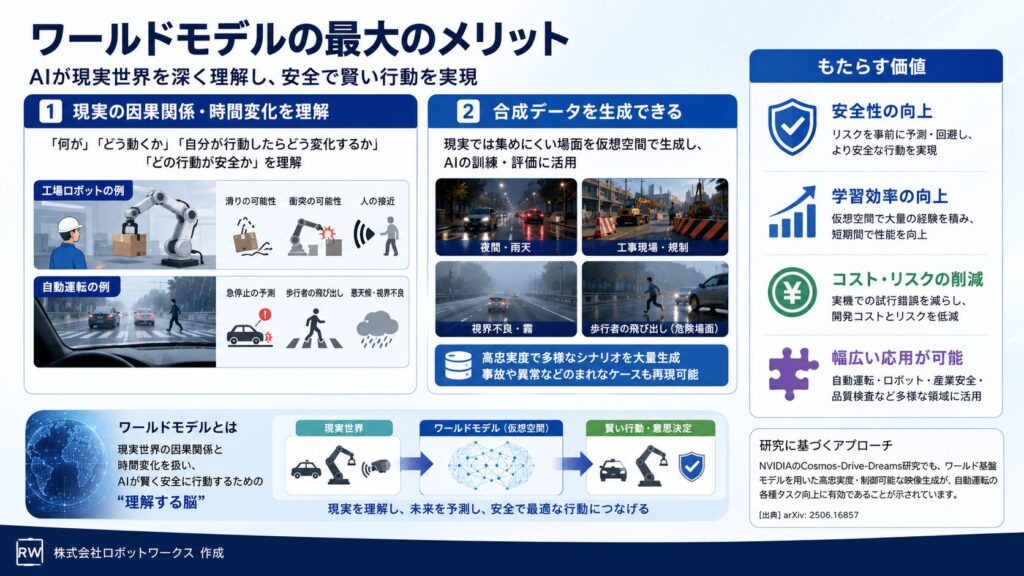
ワールドモデルを使えば、こうした場面を仮想空間で生成し、AIの訓練や評価に使うことができます。これは、自動運転、ロボット、産業安全、品質検査において非常に大きな価値があります。
NVIDIAのCosmos-Drive-Dreamsに関する研究では、自動運転のような安全性が重要なフィジカルAIシステムでは、実世界データの収集とアノテーションに時間とコストがかかり、特にまれなエッジケースの取得が難しいと指摘されています。同研究では、ワールド基盤モデルを使って高忠実度で制御可能な運転映像を生成し、3D車線検出、3D物体検出、運転方策学習などの下流タスクに活用できることが示されています。(arXiv)
つまり、ワールドモデルは「現実の代わりに仮想世界を使う」技術ではなく、「現実では十分に集めにくい経験を、AIに安全かつ大量に与える」技術だと考えるべきです。
ロボット開発におけるワールドモデルの役割
ロボット開発において、ワールドモデルは非常に重要な役割を持ちます。
ロボットが現場で働くためには、単に指定された動作を繰り返すだけでは不十分です。現実の環境は常に変化します。物体の位置は毎回違い、人の動きも一定ではなく、床面や照明、障害物、作業手順も変わります。
ワールドモデルを使うことで、ロボットは仮想空間の中でさまざまな作業を練習できます。たとえば、箱を持ち上げる、棚から商品を取り出す、部品を組み付ける、人を避けながら移動する、異常が起きた時に停止する、といった動作をシミュレーション内で大量に試すことができます。
これにより、現実世界でのテスト回数を減らし、安全性を高め、開発期間を短縮できます。特にヒューマノイドロボットのように自由度が高く、動作が複雑なロボットでは、ワールドモデルとシミュレーションの重要性はさらに高まります。
今後、ヒューマノイドロボットの競争は、ロボット本体のスペックだけでは決まらなくなります。どれだけ高品質な訓練データを持っているか、どれだけ現実に近いシミュレーション環境を構築できるか、どれだけ多様なタスクを安全に学習させられるかが重要になります。
この意味で、ワールドモデルはヒューマノイドロボットの「頭の中の練習場」とも言えます。ロボットが現場に出る前に、仮想空間で何度も失敗し、学び、改善する。そのための基盤技術がワールドモデルです。
自動運転におけるワールドモデルの役割
自動運転も、ワールドモデルの重要な応用領域です。
自動運転車は、現実世界の中でも特に複雑な環境で動きます。道路には車両、歩行者、自転車、バイク、信号、標識、工事、天候、路面状態など、多くの変数があります。さらに、事故や危険場面は頻繁には起こらないため、実際の走行データだけで十分な訓練を行うことは難しいです。
ワールドモデルを使えば、現実に近い交通シーンを生成し、多様な状況を仮想的に再現できます。たとえば、雨の夜間に歩行者が突然飛び出すシーン、前方車両が急ブレーキをかけるシーン、工事現場で車線が一時的に変更されるシーンなどを生成できます。
これにより、自動運転システムは現実で危険な試験を行う前に、仮想空間で多くのシナリオを経験できます。これは安全性の向上だけでなく、開発スピードの向上にもつながります。
自動運転領域では、ワールドモデルは認識、予測、計画、検証のすべてに関わります。周囲を認識するだけでなく、将来の動きを予測し、複数の行動選択肢を比較し、最も安全で効率的な行動を選ぶために使われます。
動画分析におけるワールドモデルの可能性
ワールドモデルは、ロボットや自動運転だけでなく、動画分析にも応用できます。
従来の動画分析では、物体検出、人物検出、異常検知などが中心でした。しかし、ワールドモデルを使うと、映像の中で何が起きているのかを、より文脈的に理解できるようになります。
たとえば、工場の監視映像から、作業者が危険な動きをしているか、設備の近くに入ってはいけないタイミングで人が接近しているか、ライン上で異常な動きが発生しているかを判断できます。スマートシティでは、交通量、人流、事故、混雑、環境リスクなどをより高度に分析できます。
重要なのは、単に「人がいる」「車がある」と認識するだけではなく、「なぜその状態になったのか」「次に何が起こりそうか」「どこにリスクがあるのか」を理解できる可能性がある点です。
産業現場では、これは安全管理、品質検査、設備保全、作業効率化に直結します。たとえば、製造ラインの映像から不良品の兆候を検出したり、作業手順の逸脱を見つけたり、事故の原因分析を行ったりすることができます。
ワールドモデルは「未来予測」だけではない
ワールドモデルという言葉を聞くと、「未来を予測するAI」と理解されることがあります。これは間違いではありません。しかし、それだけでは不十分です。
ワールドモデルの本質は、現実世界の構造を理解し、行動の結果を予測し、より良い意思決定につなげることです。
未来の映像を生成するだけであれば、動画生成AIの延長として理解できます。しかし、フィジカルAIに必要なワールドモデルは、映像生成よりも一段深いものです。ロボットや自動運転車にとって重要なのは、「それらしい未来」ではなく、「行動に使える未来」です。
たとえば、ロボットが箱を持ち上げようとしている場合、ワールドモデルは箱が動く映像を作るだけでは足りません。その箱が重すぎて持ち上がらないのか、滑りやすいのか、持ち上げると隣の物体にぶつかるのか、別の持ち方をすべきなのかを判断する必要があります。
この意味で、ワールドモデルは「世界を理解するAI」と「未来を予測するAI」の両方の性格を持っています。そしてロボットや自動運転においては、理解と予測を行動につなげることが最も重要です。
日本企業が注目すべきポイント
日本企業にとって、ワールドモデルは単なるAI研究の話ではありません。製造業、物流、建設、介護、警備、モビリティ、スマートシティなど、多くの産業に関係する技術です。

第一に、ロボット導入の前提が変わる可能性があります。これまでロボット導入では、現場ごとにティーチングし、決められた動作を繰り返すことが中心でした。しかし、ワールドモデルとフィジカルAIが発展すれば、ロボットはより柔軟に環境を理解し、未知の状況にも対応しやすくなります。
第二に、現場データの価値が高まります。製造現場、物流倉庫、店舗、工場、建設現場などで蓄積される映像やセンサーデータは、将来的にワールドモデルの後期学習や評価に使える重要な資産になります。ただし、データ管理、プライバシー、セキュリティ、権利関係の整理が不可欠です。
第三に、シミュレーションと実機検証の重要性が増します。ロボットや自動運転の導入では、いきなり現場に入れるのではなく、仮想環境で検証し、リスクを下げたうえで段階的に導入する流れが強まると考えられます。
第四に、海外企業との連携可能性が広がります。NVIDIA Cosmosのような基盤モデル、Unitreeのようなロボット本体メーカー、センサー企業、ロボットハンド企業、シミュレーション企業が組み合わさることで、ロボット開発のエコシステムはますます複雑になります。日本企業は、自社ですべてを開発するのではなく、どの領域で海外技術を活用し、どの領域で自社の強みを出すかを考える必要があります。
中国ロボット産業を見るうえでの示唆
中国では、ヒューマノイドロボット、配送ロボット、ドローン、自動運転、スマートファクトリー、産業用ロボットなど、フィジカルAIに関わる企業が急速に増えています。深圳、杭州、北京、上海などでは、ロボット本体だけでなく、センサー、アクチュエータ、減速機、ロボットハンド、AIチップ、シミュレーション、データ基盤を含めた産業チェーンが形成されつつあります。
ワールドモデルの普及は、この産業チェーンに新しい競争軸を加えます。今後は、ロボットのハードウェアだけでなく、どのような学習基盤を持っているか、どのようなデータを持っているか、どのようなシミュレーション環境と接続できるかが重要になります。
中国ロボット企業を見る際には、製品スペックだけでなく、以下の点を確認する必要があります。
・どのようなAIモデルやワールドモデルと接続しているか
・実機データ、シミュレーションデータ、合成データをどのように活用しているか
・ロボット本体とソフトウェア、クラウド、開発環境がどの程度統合されているか
・日本市場向けに安全性、保守、データ管理、通信環境をどう設計できるか
・研究用途、展示用途、実証実験用途、商用導入用途のどこまで対応できるか
特に、ヒューマノイドロボットや自律移動ロボットのような分野では、発表動画だけで判断するのは危険です。実際の現場でどこまで安定して動くのか、どのような条件では失敗するのか、どの程度の人間介入が必要なのかを確認する必要があります。
株式会社ロボットワークスとしての視点
株式会社ロボットワークスでは、中国ロボット企業、フィジカルAI、スマートファクトリー、自動運転、ドローン、ヒューマノイドロボットなどの動向を継続的に調査しています。
今回のワールドモデルのテーマは、ロボット産業の見方を大きく変えるものです。これまでは、ロボット本体の価格、可搬重量、自由度、歩行性能、稼働時間などが注目されてきました。しかし、今後はそれだけでは足りません。
ロボットがどのように世界を理解するのか。
どのように未来を予測するのか。
どのように仮想空間で学習するのか。
どのように現場データを使って賢くなるのか。
どのように安全に実機へ展開するのか。
こうした論点が、ロボット導入や企業連携を考えるうえで重要になります。
日本企業にとって、ワールドモデルはまだ抽象的に聞こえるかもしれません。しかし、数年後には、ロボットや自動運転、産業AIを評価する際の重要な基準になっている可能性があります。特に製造業、物流、介護、警備、建設、モビリティ領域では、ワールドモデルを含むフィジカルAI基盤をどのように活用するかが、競争力に直結する可能性があります。
株式会社ロボットワークスでは、中国ロボット企業の調査、深圳・杭州・北京などでの企業訪問、フィジカルAI関連企業の技術評価、日中間の事業開発、導入可能性調査、サプライチェーン調査、ビジネスマッチングを支援しています。
中国ロボット企業の動向、ワールドモデルやフィジカルAIの事業活用、ロボット導入可能性の調査にご関心のある法人様は、株式会社ロボットワークスまでお問い合わせください。



コメント